lms-esp32-pybricks-info
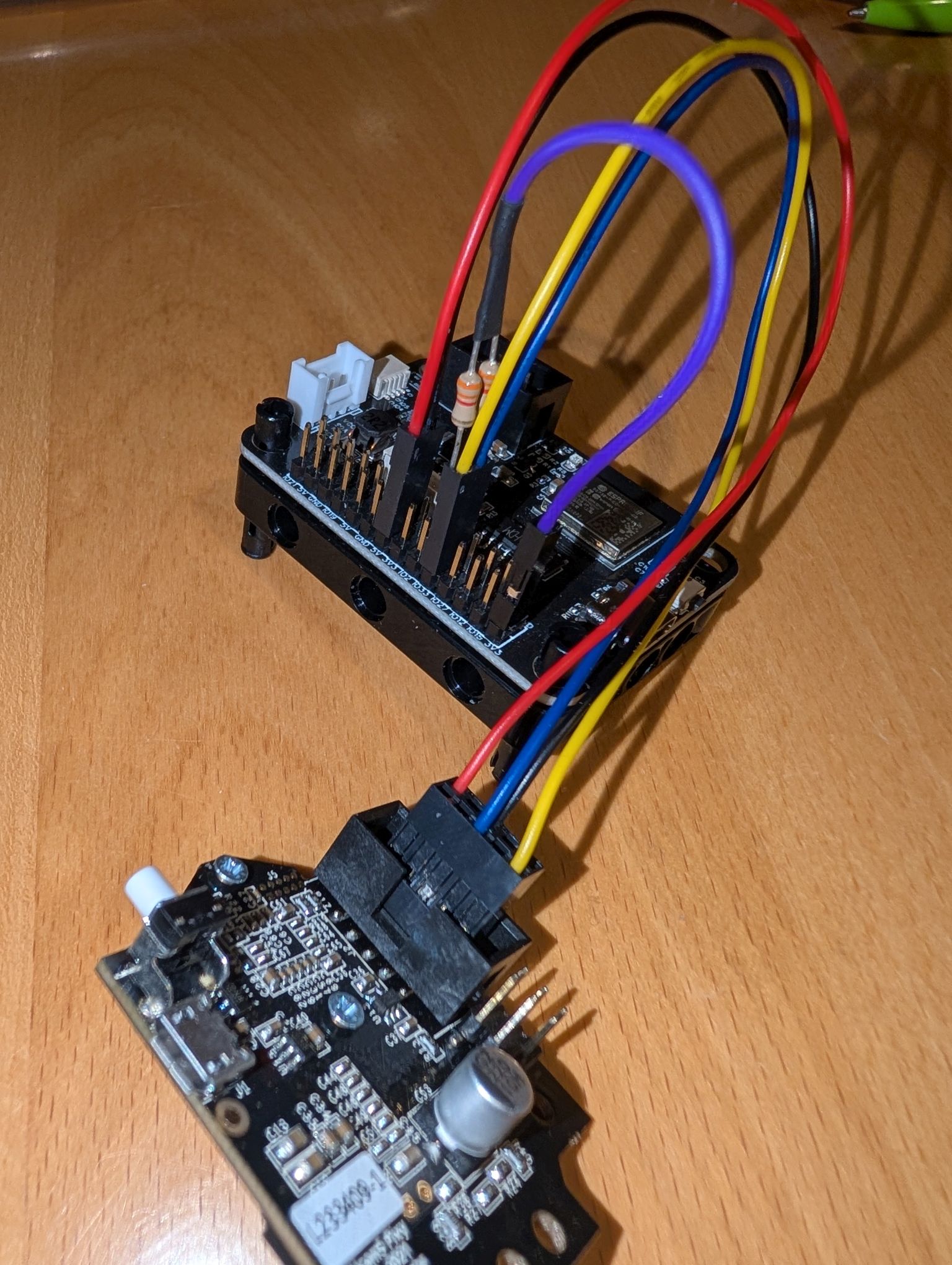
Using the Pixy2 camera with the LMS-ESP32 board from Antons Mindstorms and LEGO® Spike running Pybricks
The example below uses the indigoparadox/boxes_and_bots library.
LMS-ESP32 code:
from neopixel import NeoPixel
from machine import Pin, SoftI2C
from pupremote import PUPRemoteSensor
from pixy import CMUcam5 # copy from https://github.com/indigoparadox/boxes_and_bots/blob/master/drivers/micropython/cmucam5/pixy.py
import sys, time
np = NeoPixel(Pin(25), 1) # onboard neopixel
def statusLed(r,g,b):
np[0] = r,g,b
np.write()
def sLamp(a, b):
pixy.set_lamp(a, b)
def sBrit(v):
pixy.set_brightness(v)
def gRGB(x, y):
return pixy.get_rgb(x, y, 0)
try:
statusLed(0, 0, 255) # blue = connection wait
rs = PUPRemoteSensor(power=True)
rs.add_command('sLamp', '', 'bb')
rs.add_command('sBrit', '', 'B')
rs.add_command('gRGB', 'BBB', 'HB')
rs.process()
statusLed(255, 255, 0) # yellow = initialize
# PixyMon->Configure->Interface=I2C + address 0x54, scl+sda with 3k3 pull-up each to 3.3V
pixy = CMUcam5(SoftI2C(freq=1000000, scl=Pin(32), sda=Pin(33)))
pixy.init(callback=rs.process) # power turned off w/o periodic heartbeat
except Exception as e:
statusLed(255, 0, 0) # red = error
raise
statusLed(0, 255, 0) # green = ready
while True:
try:
rs.process()
except Exception as e:
if isinstance(e, KeyboardInterrupt):
break
sys.print_exception(e)
statusLed(255, 0, 0) # red = failed
time.sleep_ms(100)
statusLed(0, 255, 0) # green = retry
Pybricks code:
from pybricks.parameters import Port
from pupremote_hub import PUPRemoteHub # copy from https://github.com/antonvh/PUPRemote/blob/main/src/pupremote_hub.py
import pixy_color # copy from example folder
rh = PUPRemoteHub(Port.A)
rh.add_command('sLamp', '', 'bb')
rh.add_command('sBrit', '', 'B')
rh.add_command('gRGB', 'BBB', 'HB')
rh.call('sLamp', 1, 1)
rh.call('sBrit', 60)
while True:
r,g,b = rh.call('gRGB', 150, 100)
h,s,v = pixy_color.rgb_to_hsv(r,g,b)
c = pixy_color.hsv_to_color(h,s,v)
print(f'rgb : {r:3} {g:3} {b:3} hsv : {h:3} {s:3} {v:3} color : {c}')
Connections
The camera can be connected with different interfaces. Use I2C with 3k3 pullup for SDA and SCL to 3.3V or connect in parallel with another I2C device already having integrated pullups.
The camera permanently draws 240 mA. To preserve Spike battery capacity you should think about adding a powerbank to the LMS-ESP32 and initialize PUPRemoteSensor with power=False, then you can swap initialize/connect blocks and omit the callback.